

吉峰循环水养殖智投喂机器人
询底价基本参数
- 品牌:吉峰
- 型号:
- 分类:投喂机器人
产品介绍





吉峰循环水养殖智投喂机器人产品介绍
1.概述
投喂机器人是针对水产养殖定制研发的自动投喂机器人,该机器人每日定时对养殖场的各水池进行饲料抛洒投喂,用户可以通过上位机设置投喂时间、投喂量。
2.功能
精准投喂:通过上位机设置投喂量、投喂时间,机器人定时定量投喂,精准控制投喂量和频率,避免饲料浪费和水质污染。
自动巡航投喂:能自主巡航,按照设定的投喂量和时间到达指定位置投喂。
自动充电:机器人使用电池供电,当电量低于设定阈值30%时,自动返回充电点进行充电,并在充电完成后继续执行巡检任务。
自动上料:当投喂桶内饲料低于设定阈值时,机器人自动返回上料点,上料系统给投喂桶上料,并在料满后自动停止上料。
3. 应用优势
提高养殖效率:替代人工投喂,节省人力成本,尤其适用于大规模养殖场景,可在短时间内完成大面积投喂工作。
提升养殖质量:精准投喂保证水产动物获得充足、适宜营养,促进生长,提高养殖产品质量和产量,减少因投喂不均导致的生长差异。
优化养殖环境:精确控制投喂量,减少残饵对水质的污染,降低水中氨氮、亚硝酸盐等有害物质含量,维持良好水质环境。
助力养殖智能化:是水产养殖智能化的重要环节,可与水质监测、增氧等其他智能设备集成,构建智能化养殖管理系统,实现自动化和智能化养殖。
4. 机器人使用说明
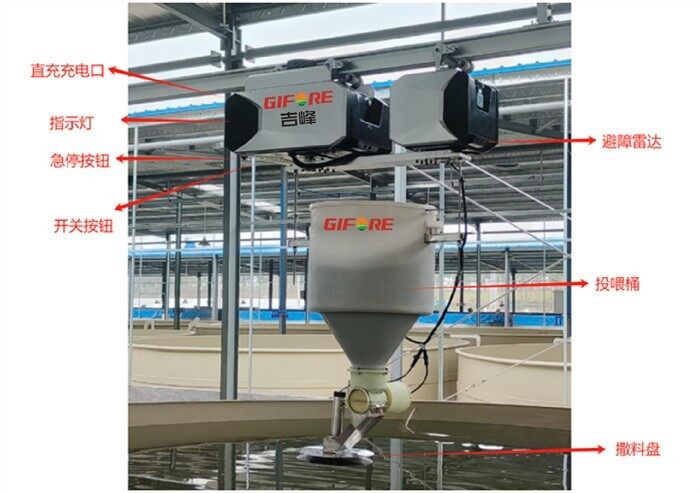
| 序号 | 名称 | 说明 | 备注 |
| 1 | 指示灯 | 机器人状态指示灯 | |
| 绿灯常亮:正常工作 | |||
| 黄灯闪烁:机器人网络异常 | |||
| 蓝灯闪烁:(1)机器人复位中(2)避障雷达报警 | |||
| 2 | 避障传感器 | 实时探测机器人行走方向是否有障碍物遮挡,若距离障碍物25cm,则机器人停止运行并发出报警,障碍物移除后,机器人继续行走 | |
| 3 | 投喂桶 | / | |
| 4 | 撒料盘 | / | |
| 5 | 直充充电口 | 应急直充充电口 | 使用出厂配置的充电器 |
| 6 | 开关按钮 | 机器人开关 | |
| 6 | 急停按钮 | 按钮按下时机器人停止行走,松开按钮机器人继续行走 |
使用说明:
机器人通过内置电池供电,当机器人电量低于阈值点时,会进入充电模式,自动回到充电位进行无线充电。
1、 上电:按下开关按钮,机器人即可通电,同时机器人上状态指示灯亮起,若机器人不在起始位置,机器人指示灯蓝灯闪烁,并向起始位置行走,若达起始位置,机器人会黄灯闪烁,代表正在连接网络,网络正常时,指示灯绿灯常亮,等待巡检任务。
2、断电:再次按下开关按钮,机器人断电,同时机器人上状态指示灯熄灭。
3、 急停:按下急停按钮,机器人会进入急停状态,紧急停止原地待命,轻轻扭动按钮,按钮拨开,机器人退出急停状态恢复正常运行。
机器人充电桩
机器人充电桩安装在机器人起始点位置,当机器人电量低于充电阈值或任务执行完成后都会自动返回充电位置补充电量,电量充满后自动停止充电。
充电桩面板有三个LED指示灯,颜色为绿、黄、红,分别为电源指示灯、工作状态指示灯、故障代码输出指示灯。
电源指示灯:绿色。该灯亮时表示发射控制盒电源工作正常。
工作状态指示灯:黄色。发射控制盒电源工作正常时,该灯不亮表示充电器处于待机状态;闪亮表示正常充电状态;常亮表示充电完成。
故障代码输出指示灯:红色。该灯在充电器正常工作时不亮,有故障出现时该灯闪亮,快闪(0.5S/次)次数即为故障代码。故障消除前会一直报相应故 障代码,每报一次间隔3S以上(受充电器再次启动影响,每次间隔时间不完全一样,但至 少会间隔3S)时间,直到故障排除为止。例如:充电器出现5号故障,红灯会快闪5次,如 故障没有排除,间隔3S以上时间后,会再次快闪5次,直到故障排除为止
故障代码如下表所示
| 故障 | 交替 | 报警描述 | 可能原因 | 排除方法 |
| 代码 | 次数 | |||
| 1 | 1 | 通讯报警 | 1、接收线圈没在充电范围内 | 1.确保接收线圈在充电范围内 |
| 2、天线连接异常 | 2.确保发射机箱、接收机箱的天线头接触完好。若天线头磕碰进去,可拧开端子,将天线向外拉,再将端子拧紧。 | |||
| 3、控制板损坏 | 3.返厂维修。 | |||
| 2 | 2 | 发射过流报警 | 1、线圈之间距离过远或者偏移过大2、线圈周围或线圈之间有金属异物 | 1.确保充电距离与偏移在规格范围内。 |
| 2.线圈周围 2CM没有金属物,两个充电线圈中间没有金属或磁性物质。 | ||||
| 3 | 3 | |||
| 4 | 4 | |||
| 5 | 5 | 充电电流过流报警 | 1、充电过程中线圈有剧烈抖动或线圈伸出线有剧烈摆动 | 1、请保证充电过程中尽量不要移动线圈 |
| 6 | 6 | 2、线圈之间有活动金属异物 | 2、检查两线圈中间有无金属异物 | |
| 7 | 7 | |||
| 8 | 8 | 充电电压过压报警 | 1、充电过程中线圈有剧烈抖动或线圈伸出线有剧烈摆动 | 1.请保证充电过程中线圈不要移动且两线圈中间无金属物影响 |
| 9 | 9 | 2、充电过程中电池保护板动作或电池断开 | 2.查看电池规格书,确保充电器最高电压小于电池保护电压。 | |
| 10 | 10 | |||
| 12 | 12 | 接收机箱过温报警 | 1、外部环境温度过高 | 1.停止充电,充电器冷却后再启动充电 |
| 13 | 13 | 2、接收控制盒内置风扇损坏或风扇控制异常 | 2.检查接收控制盒内风扇是否正常运转 | |
| 14 | 14 | 发射机箱无电流报警 | 1、发射线圈与控制盒接线接触不良 | 1. 检查发射线圈的对接端子接触是否良好。 |
| 2、发射控制器损坏 | 2. 返厂维修。 | |||
| 17 | 17 | 设备温度传感器失效 | 温度传感器损坏 | 返厂维修 |
| 18 | 18 | 发射机箱过温报警 | 1、外部环境温度过高 | 1. 停止充电,充电器冷却后再启动 |
| 19 | 19 | 2、发射控制盒内置风扇损坏或风扇控制异常 | 2. 检查发射控制盒内风扇是否正常运转 |
吉峰投喂机器人技术参数
| 智能巡检机器人技术参数 | ||||
| 序号 | 项目 | 类别 | 规格参数 | 备注 |
| 1 | 物理参数 | 防护等级 | IP65 | |
| 2 | 电源 | 典型功耗 | 不大于400W | |
| 3 | 供电电压 | DC36V | ||
| 4 | 机器人供电方式 | 电池 | ||
| 5 | 充电时间 | 4h | ||
| 6 | 续航时间 | 8h,单次充电可连续行走4km | ||
| 7 | 环境特性 | 工作温度 | -20℃至+60℃ | |
| 8 | 工作湿度 | 5%~95%(无冷凝水) | ||
| 9 | 存储温度 | -25℃至+65℃ | ||
| 10 | 存储湿度 | 5%~95%(无冷凝水) | ||
| 11 | 通信系统 | 通信方式 | 无线 | |
| 12 | 传输频段 | 5 GHz : 5.150 - 5.850 GHz (FCC 5.150 - 5.250 和 5.725 - 5.850 GHz) | ||
| 13 | 通讯速率 | 802.11 ac @ 40 MHz: 400, 360, 300, 270, 240, 180, 120, 90, 60, 30 Mbps | ||
| 802.11 ac @ 80 MHz: 866, 780, 650, 585, 520, 390, 260, 195, 130, 65 Mbps | ||||
| 14 | 高低温 | 低温 | 在通电状态下应能承受-20℃,历时 4h 的低温试验,试验期间及试验后功能应正常 | |
| 15 | 高温 | 在通电状态下应能承受 60℃,历时 4h 的高温试验,试验期间及试验后功能应正常 | ||
| 16 | EMC试验 | 静电放电抗扰度 | 3 级试验等级:能承受 6kV(接触)静电放电试验 | |
| 17 | 射频电磁场辐射 | 3 级试验等级:能承受频率范围为80MHz ~ 1GHz ( 调 制 幅 度 :80%AM(1kHz))的射频电磁场辐射干扰试验,试验场强为 10V/m,试验中及试验后功能应正常 | ||
| 抗扰度 | ||||
| 18 | 工频磁场抗扰度 | 3 级试验等级:能承受频率为 50Hz(线圈方向:X、Y、Z)的工频磁场 抗 扰 度 试 验 , 试 验 场 强 为10A/m,试验中及试验后功能应正常 | ||
| 试验 | ||||
| 19 | 脉冲抗扰度试验 | 3 级试验等级:能承受磁场强度100A/m(线圈方向:X、Y、Z),脉冲波形:6.4/16μs,试验中及试验后功能应正常 | ||
| 20 | 安全性能 | 绝缘性能 | ≥100MΩ | |
| 21 | 运动特性 | 行走方式 | 挂轨式 | |
| 22 | 水平定位精度(重复) | 2mm | ||
| 23 | 运动速度 | 0-1m/s连续可调 | ||
| 24 | 制动距离 | 2cm(0.3m/s巡检速度紧急刹车) | ||
| 25 | 转弯半径 | 100cm | ||
| 26 | 避障距离 | 0.3-2.5米可调 | ||
| 27 | 爬坡能力 | ≤45° | ||
| 无线充电系统 | ||
| 序号 | 类别 | 规格参数 |
| 1 | 充电方式 | 无线非接触式 |
| 2 | 工作原理 | 电场/磁场/谐振 |
| 3 | 输出功率 | 600W |
| 4 | 输入电压 | 176VAC-264VAC 45~65Hz |
| 5 | 输入功率因数 | ≥0.99 |
| 6 | 充电电压 | 18~60VDC |
| 7 | 充电电流 | 1~10A,可设置 |
| 8 | 稳流精度 | ≤1.0% |
| 9 | 稳压精度 | ≤1.0% |
| 10 | 电源效率 | ≥87% |
| 11 | 充电距离 | 15-45mm |
| 12 | X/Y轴偏移范围 | ±20mm |
| 13 | 充电参数设置精度 | 电压0.1V,电流0.1A |
| 14 | 工作温度 | -35℃至+60℃ |
| 15 | 倾斜角 | ≤15° |
| 16 | 通讯协议 | RS485 |
| 17 | 保护功能 | 过流、过压、过温、反极、短路、开路 |
| 18 | 噪音 | ≤50Db(A) |
农机补贴
吉峰循环水养殖智投喂机器人补贴额度
成交价格
吉峰循环水养殖智投喂机器人成交价格参考,信息由编辑整理及用户提供,仅供参考,如有较大偏差敬请谅解!
| 年份 | 地区 | 型号 | 价格 | 补贴 |
|---|---|---|---|---|
| 暂无信息 | ||||
经销商报价 不限
| 经销单位 | 参考价格 | 联系电话 |
|---|---|---|
| 四川吉峰农机连锁有限公司 | 19万 | 点击查看 |
| 江苏吉峰农机有限公司 | 19万 | 点击查看 |
二手投喂机器人

新疆牧神4YZB—5玉米收割机
价格8.5万
2016年 | 黑龙江2026-06-26
谷王tk100max小麦收割机
价格19.3万
2026年 | 河南2026-06-25
牧神4YZB-4B自走式穗茎兼玉米收割机
价格6万
2019年 | 辽宁2026-06-23
中联谷王4LZ-8B1谷物联合收割机
价格2.8万
2020年 | 1300小时 | 安徽2026-06-23
中联重科Tk100por联合收割机
价格7万
2024年 | 280小时 | 山东2026-06-22
英虎24款四行玉米收割机
价格13万
2024年 | 410小时 | 山东2026-06-22英虎24款四行玉米收割机
价格13万
2024年 | 410小时 | 山东2026-06-22
农夫牌902履带拖拉机
价格2.2万
2020年 | 860小时 | 湖北2026-06-22
相似投喂机器人产品
吉峰投喂机器人同类产品推荐




看视频






关注农机通,查看更多精彩内容



- 暂无评论


